Guan, JC(Guan, Jinchao) ;Yang, X(Yang, Xu) ;Lee, VCS(Lee, Vincent C. S.) ;Liu, WB(Liu, Wenbo);Li, Y(Li, Yi) ;Ding, L(Ding, Ling) ;Hui, B(Hui, Bing)
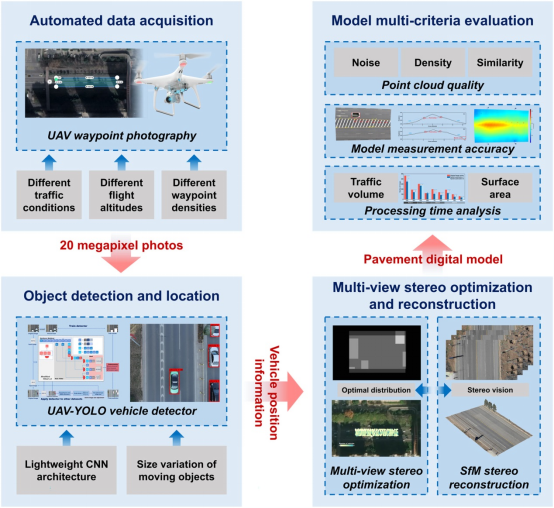
Abstract:Three-dimensional (3D) surface information is becoming the data of choice for pavement inspection and maintenance. Pavement digital reconstruction still faces various challenges, including field-of-view (FOV) limits, traffic influences, data acquisition speed and cost. This paper presents a full-FOV pavement stereo reconstruction framework integrating unmanned aerial vehicle (UAV) photography, object detection and multi-view occlusion optimization. A UAV-YOLO vehicle detector embedding depth-wise separable convolution and resolution adjustment unit is developed for noise localization. To improve reconstruction quality and speed, multi-view occlusion optimization is proposed for determining the optimal image series spatial distribution. The results show that the UAV-YOLO detector achieves an overall AP75 of 93.69% with an inference speed of 157 FPS. Through multi-criterion evaluation, the pavement digital models reconstructed under dynamic traffic conditions have satisfactory performance in terms of point cloud noise, density, similarity and accuracy. In addition, the proposed stereo reconstruction workflow saves 30.27% processing time over conventional SfM workflow.
https://doi.org/10.1016/j.autcon.2022.104615